








뉴스와 정보
커뮤니티 게시판
함종별 게시판
월드오브탱크 인벤
공통 커뮤니티
- 오픈 이슈 갤러리
- 오늘의 핫벤
- 오늘의 팟벤
- AI 그림 그리기
- PC 견적 게시판
- 코스프레 갤러리
- (19)무인도는 첨이지?
- 게이밍 주변기기
- 지름/개봉 갤러리
- 게이머 토론장
- 게임 추천/소감
- 무엇이든 물어보세요
- 최근 논란중인 이야기
- 더보기
인기 팟벤
|
2017-07-24 12:24
조회: 565
추천: 0
미해군 5인치 포탑 구동방식 정리 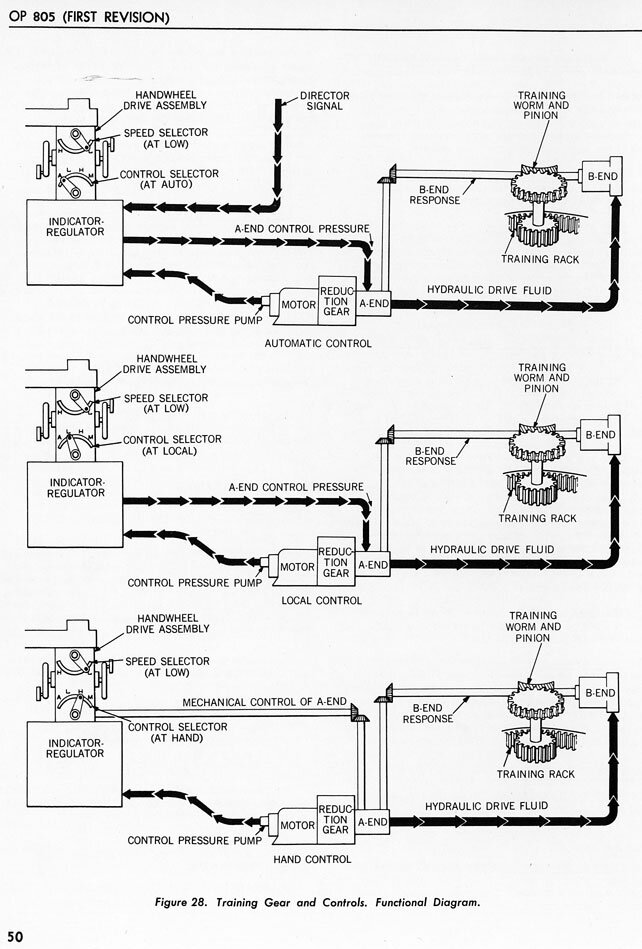  구동방식에는 세가지 모드가 존재합니다. Auto/Local/Hand 기본적으로 유압 모터의 힘으로 작동되며 작동 불능시엔 인력으로 가동할 수 있게 되있습니다. 짤은 순서대로 회전, 부앙 우선 auto모드. 두 짤의 첫번째 그림처럼 indicator regulator가 함교 위 director로부터 신호를 받고 자체적으로 유압을 줘서 웜기어를 돌려 회전/부양을 합니다 두번째로 Local. 함교 위 director로부터 연결이 끊기면 control selector를 local로 전환하게 되고 포탑 내부에서 자체적으로 유압장치를 조종하게 됩니다. 마지막으로 Hand. 유압장치까지 맛이가면 사용하는 최후의 발악(?)정도 되겠습니다. 간단합니다. 인력으로 유압 공급 밑짤은 미구축의 영원한친구 2 
EXP
172,202
(48%)
/ 185,001
인장공사 들어갑니다!
드디어
|
 홍차가식었엉
홍차가식었엉