주제: Making Hard Surface Easy
강연자 : 톰 솔버그 - 엠바크 스튜디오
발표 분야 : 게임기획 / 프로그래밍 / 비주얼 아트
권장 대상 : 게임 디자이너, 애니메이터, 애니메이션 프로그래머, 테크니컬 애니메이터
난이도 : 사전지식 불필요 : 관련 전공이나 경력이 전혀 없더라도 이해할 수 있는 내용
[강연 주제] At Embark Studios we have been building a system for Physically Based Animation of Large Virtual Robots. The goal of this is to create more emergent and interesting physical gameplay. Just like Physically Based Rendering improves fidelity and realism of graphics, Physically Based Animation improves the quality and realism of movements. On top of this, our players are also able to interact with these animations -- a heavy impact from a player will create a unique and believable response without any designer input. In this talk, we will describe the progress we have made so far, the possibilities and challenges we have seen, and what we hope to gain in the future.
엠바크 스튜디오는 스웨덴에 위치한 넥슨의 자회사로, 굉장히 기술 지향적인 면모를 지닌 신생 개발사이다. 그들은 2021년 출시를 목표로 하는 AAA급 게임을 개발 중이며, 이에 대해 넥슨의 오웬 마호니 대표는 '게임의 개발 플로우와 게임 플레이를 완전히 바꿔 놓을 것'이라며 자신감을 표한 바 있다.
'엠바크 스튜디오'의 톰 솔버그는 머신 러닝을 연구, 개발하는 엔지니어로서 일하고 있다. 그는 엠바크 스튜디오의 프로젝트 내에 등장하는 '로봇'들의 움직임을 연구하고 있으며, 게임 속 로봇들이 스스로 움직일 수 있도록 움직이는 법을 학습시키는 프로그램을 진행하고 있다.
NDC 2021의 마지막 날, 톰 솔버그의 강연이 공개되었다. '로봇을 훈련시키는 방법'이라는 제목의 강연에서 그는 자신이 어떻게 로봇을 훈련시키고, 게임 속 로봇이 어떻게 스스로 움직이게끔 만드는지, 그리고 그 수준이 어느 정도에 이르렀는지를 발표했다.
■ '물리 기반 애니메이션'에 대한 이해
먼저, 톰 솔버그는 게임 내에서 움직이는 오브젝트들의 이동이 '물리 기반 애니메이션'에 속한다는 것을 강조했다. 동시에 이 '물리 기반 애니메이션'이 '물리학'이라는 학문 기반의 시뮬레이션이 아닌 직접적으로 게임에 영향을 주는 요소임을 말했다. '애니메이션'이란 결국 비주얼의 한 분야이며, 게임을 개발에서 '비주얼'이란 전통적으로 그럴싸하면서도 최대한 보기 좋게 만드는 것이 기본이다.
하지만 '물리 기반 렌더링'이 기본이 된 지금은 문법이 다소 달라졌다. 물리 기반 렌더링이 일반화되기 이전의 셰이더 디자인과 그래픽은 주로 '정확함'보다는 '좋아 보이는 것'에 주력했다. 하지만 물리 기반 렌더링이 이 개념을 뒤집었다. 오늘날 애니메이터들은 각종 매터리얼이 어떻게 동작하는지부터 시작해 현실적 제약 내에서 최대한 훌륭한 아트워크를 만들기 위해 노력한다. 그리고 최대한 '현실적인' 결과를 만들어내기 위해 애니메이터들은 광학과 에너지 보존을 그 기반으로 삼는다.
고전적 영역에서 애니메이션, 특히 '비인간' 대상을 위한 애니메이션에서 '정확함'은 그다지 선호되는 기준이 아니었다. '랙돌링'이나 절차주의의 영향을 받긴 하지만, 과거의 출시작 대부분에서 사물들은 부자연스럽게 구부러지거나 끊어지고, 때로는 경직되어 보이는 결함을 보인다.
물리 기반 애니메이션에서는 조금 다르다. 단순히 팔다리만 움직이는 애니메이션이 아니다. 지형을 밀며 생기는 수직항력에 의한 가속도와 마찰, 관절의 가동 범위와 신체 각 부위의 체중에 의해 움직임이 결정된다. 이렇게 '물리 기반 애니메이션'이 기반이 된 게임은 '현실성'을 추구하는 게이머들에게 높은 설득력을 보이고, 보다 높은 몰입감을 줌과 동시에 게임 내에 각종 창발적인 게임 플레이를 도입할 수 있는 기반이 된다.
이를테면, 이런 것이다. 기존의 게임 내에서 게이머가 기대하지 않았던 많은 부분들이 물리 기반 애니메이션 베이스의 게임에서는 실제로 구현될 수 있다. 격투 게임에서 상대의 발을 밟아 움직임을 봉쇄한다거나, 슈팅 게임에서 상대의 무릎을 맞춰 강제로 무릎을 꿇게 만드는 등의 플레이가 파생될 수 있는 것이다.
■ '로봇'으로 설명하는 물리 기반 애니메이션
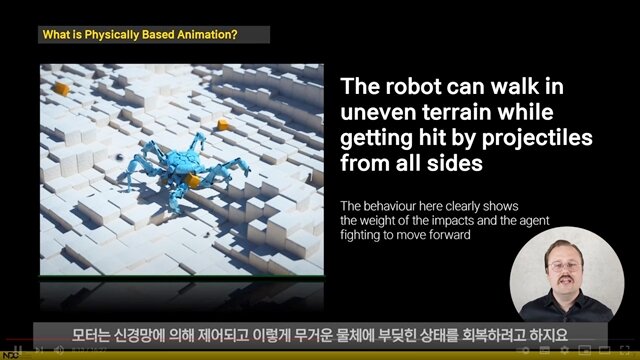
톰 솔버그는 여섯 개의 다리를 가진 '게'형태의 로봇을 예로 들었다. 엠바크 스튜디오는 각종 크고 작은 로봇 모델을 만들어 실험을 가하는데, 영상 속 로봇을 움직이는 모터는 신경망에 의해 제어되고, 꾸준히 가해지는 외력에 저항하며 '서 있는 상태'를 회복하려고 한다. 물리적으로 합리적인 외력이라면, 로봇은 언제나 현실적으로 반응한다.
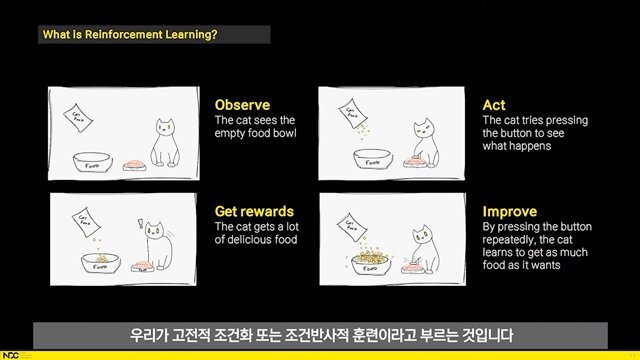
톰 솔버그와 그의 팀은 2년간의 연구를 통해 두 번의 프로젝트를 진행했고, 지난 12월에 이르러 게임 속 로봇이 '현실적 움직임'을 보일 수 있는 방법을 고안했다. 톰 솔버그와 그의 팀의 방식은 '강화 학습'이라 불리는 고전적 조건 반사 훈련이었다. 버튼을 누르면 사료가 나오는 자동 사료 공급기의 예처럼, 보상을 제공함으로서 행동을 강화하는 형태다.
이 과정은 '관찰 - 행동 - 보상 수령 - 행동 강화'라는 네 단계로 이뤄지는데, 톰 솔버그는 이와 같은 프로세스를 게임 내 로봇 모델에도 그대로 적용했다. 강화 학습의 네 단계에서 행동을 가장 강하게 제어하는 단계는 3번째인 '보상 수령'의 단계다. 고양이가 버튼을 누를 때 사료가 나온다고 해서 아무것도 하지 않고 버튼만 누르는 고양이가 나오길 원치 않듯 이 '보상 수령'의 단계는 굉장히 치밀하게 설계되어야 한다. 로봇의 경우, 안정적인 균형 상태를 유지하기 위해 걷지도, 움직이지도 않기로 판단한다면 강화 학습 단계의 설정이 잘못되었다고 말할 수 있을 것이다.
톰 솔버그의 로봇 생성 절차는 다음과 같다. 아티스트가 만든 로봇 메시를 기반으로 이를 추출해 실제 로봇의 형태를 만들어낸다. 이 때 각 관절부의 가동 범위와 인공 근육의 출력 등을 미세하게 조정해 실제로 로봇이 움직일 수 있는 동력을 만들어낸다. 이 때 로봇의 스펙을 어떻게 설정하느냐에 따라 가볍고 경쾌하게 움직이는 로봇을 만들 수도 있고, 묵직함과 육중함을 보이는 로봇을 만들 수도 있다.
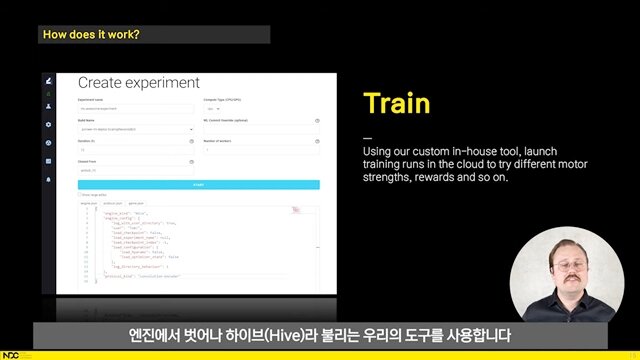
다음 단계는 기존의 애니메이터들이 사용하는 '상태 머신'이 아닌, 엠바크 스튜디오가 개발한 '하이브'를 활용하는 단계다. 하이브는 앞서 만들어진 로봇을 클라우드 내에서 비동기로 훈련시키는 과정을 수행하는데, 이 과정에서 수천 개체의 로봇 사본을 만들어 시뮬레이션을 진행한다. 이 로봇들은 뛰고, 걷고, 경사를 오르는 등 다양한 임무를 수행하게 된다. 실험 크리에이터는 이 모든 과정을 수동으로 살펴볼 수 있다.
마지막으로, 로봇이 학습에 필요한 충분한 시간을 보낸 후 성공 여부를 확인한다. 이 과정에서는 두 가지 다른 함수가 사용되는데, '로봇이 얼마나 많은 보상을 받았는지'와 '어떤 임무에 대해 보상을 받았는지'이다. 다만, 이는 일반적 시험처럼 '얼마나 잘 기억하는지'는 보여줄지언정 '얼마나 잘 걷는지', 즉 숙련도를 보여주지는 못한다.
결과적으로 톰 솔버그와 그의 팀은 많은 시간을 그저 로봇이 걷는 과정을 '보는 것'에 투자한다. 로봇의 보행 과정에서 판단 능력과 의도, 안정성, 힘과 같은 세부적인 속성을 살피고 다양한 환경에서 다수의 임무를 수행할 수 있는지를 살핀다. 그들의 목적은 로봇이 걸음의 달인이 되는 것이 아닌, 그럴싸하고 좋아 보이도록 걷는 로봇이기 때문이다.

■ '머신 러닝'을 게임에 도입할 때 마주할 과제와 도전
'톰 솔버그'는 하나의 영상으로 강연의 마지막 파트를 시작했다. 2년 간 개발한 솔루션을 통해 만든 로봇이 강화 학습을 통해 '걷는 법'을 배우는 과정을 요약한 영상이었다. 톰 솔버그의 도전은 쉽지 않았다. 먼저, '이해의 간극'이 문제가 되었다. 게임 디자이너는 게임을 만들어야 했지만, 톰 솔버그의 팀이 만드는 기술 데모와 도구를 만드는 데는 예상보다 많은 시간이 필요했다.
또한, 연구 과정이 길어지면서 게임 디자인을 하는 팀과 엔지니어들 사이에 기술 이해도의 간극이 생겼고, 무엇을 할 수 있는지와 할 수 없는지에 대한 지식의 공백이 생겨버렸다. 머신 러닝을 위한 툴은 초보 단계에 머물러 있었기에 툴 자체를 처음부터 만들어야 했기 때문이다.
'물리 기반 애니메이션'또한 게임 개발에 도입하는 것 또한 도전적인 부분이었다. 톰 솔버그와 머신 러닝 엔지니어 팀은 게임 디자이너들이 거리낌 없이 '법칙 파괴'를 수행할 수 있다는 것을 고려하지 않았다. 이른바 '게임적 허용'이다. 하지만 물리 기반 애니메이션으로 렌더링한 게임에서는 모든 요소가 물리적으로 합당하게 움직여야 했기 때문에 디자이너의 상상이 제한될 수밖에 없다.
'할리우드'가 만들어낸 수많은 창작물들 또한 예상 외의 허들이 되었다. 할리우드의 영화 예술은 수많은 매력적인 창작물들을 만들어냈고, 게임 디자이너들은 이런 작품들에서 다양한 영감을 얻는다. 하지만, 실제로 할리우드 영화에 등장하는 수많은 로봇들은 로봇공학적 관점에서 물리적 타당성을 보이지 않는다. 자신의 무게를 못 이겨 고장나거나 움직일 수 없는 경우가 대부분이다. 이들은 게임 개발 팀에게 'No'라고 말할 수밖에 없었고, 아티스트가 질량, 균형, 영향력 등을 고려하게 설득하기까지 많은 시간이 걸릴 수밖에 없었다.
하지만, 그럼에도 '물리 기반 애니메이션'을 추구할 이유는 분명하다. 이전보다 훨씬 현실적인 움직임을 만들 수 있고 스크립트로 짜여 있지 않은, 실제 물리 법칙 내에서 가능한 모든 행동과 상황이 게임 내에서 구현될 수 있다. 마지막으로, 게임 내 모든 요소들이 무언가를 배우고, 진화하며, 계속해서 바뀌어 감으로서 게임 속 세상을 보다 풍성하고 현실적으로 만든다.
현실적인 제약은 분명하다. 그럼에도 지금까지와는 다른, 인위적 세상이 아닌 실제 세계의 법칙을 따르는 가상의 세계를 만들 수 있다는 것. 그것 만으로 '물리 기반 애니메이션'을 기본으로 하는 게임은 충분히 '다음 세대'의 게임으로 여길 만한 가치가 있다. '톰 솔버그'의 강연은 다음 세대의 게임에 대한 청사진을 보여주며 길을 제시했다. 그리고 이와 같은 그의 주장이 실제로 구현 가능할지는, 엠바크 스튜디오의 게임이 증명해 줄 것이다.