








|
2024-01-22 15:51
조회: 621
추천: 0
관측 거리 문제관측거리 450m인 전차가 수풀이 없는 전차를 380m에서 발견 했다. 식물위장 보너스 25인 수풀 뒤의 같은 전차를 280m에서 발견 했을 경우, 식물위장 보너스 50인 수풀 뒤의 같은 전차는 몇 m에서 발견할까요? 관측거리 공식 : 피관측자가 탐지 되는 거리 = 관측자의 관측 범위 - (관측자의 관측 범위-50) × (피관측자의 위장 수치 + 식물위장률) / 100 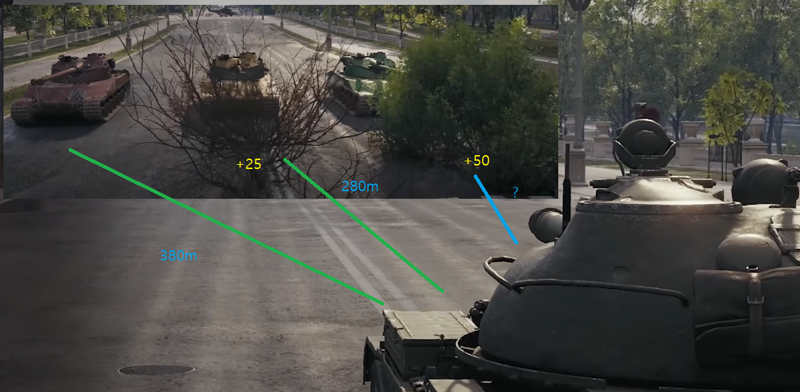
EXP
8,603
(50%)
/ 9,001
 
|
인벤 공식 앱
댓글 알람 기능 장착! 최신 게임뉴스를 한 눈에 보자
 신의한수사이
신의한수사이